Sorry, I have another question:
how is cycle consistency loss and identity loss different? Both are pixel difference of ground image and cycle-return image, based on lecture content… I mean, one could construct a style (consistency) loss based on pixel gradient difference rather than pixel difference nad then to match colors use pixel difference (identity loss); but this is not what the video on consistency loss described.
Thank you

1 Like
After doing program assignment, I see the difference between consistency and identity loss. But if consistency loss looks at pixel distance, wouldn’t it also track color? For style which is color-blind, one needs to check some kind of pixel gradient, not magnitude of pixels themselves… Otherwise, it seems that consistency loss also tracks color.
Hope to get some prospective from others.
Thanks!
1 Like
Hi @Dennis_Sinitsky,
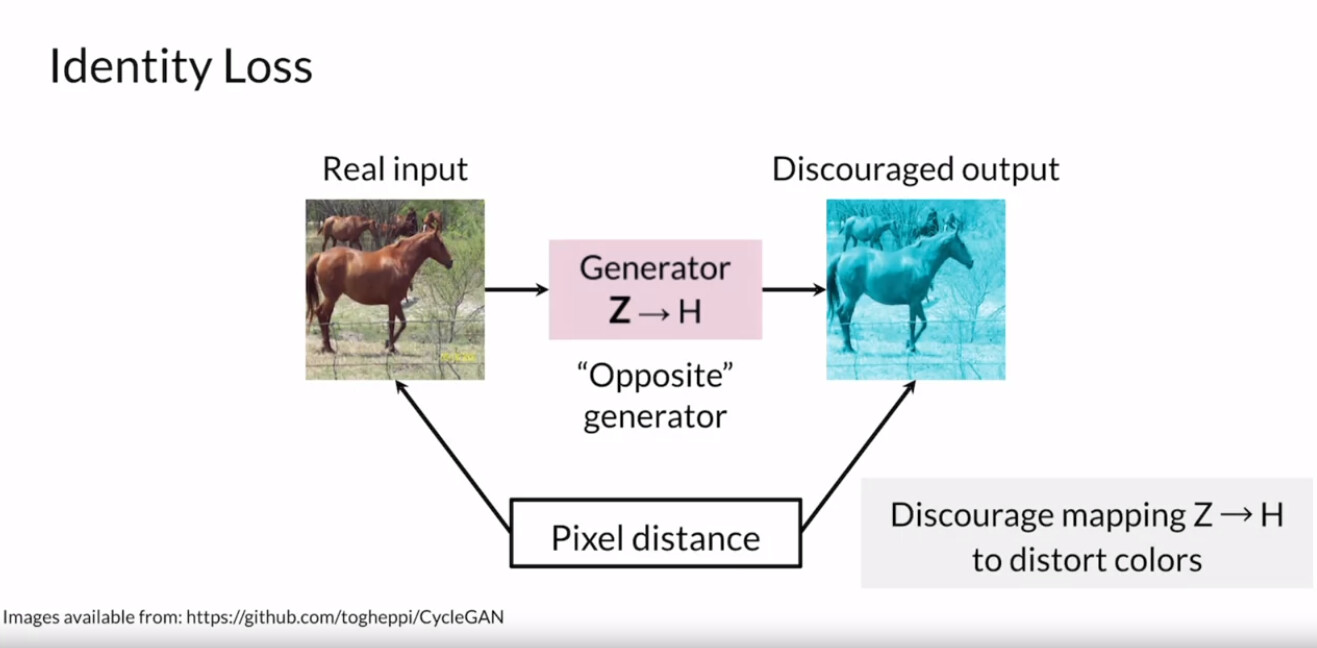
One difference with cycle consistency loss vs identity loss is that cycle consistency is using a full cycle -e.g. from zebra to horse and back to zebra, where identity loss is just doing one direction - e.g. putting a horse image through the zebra-to-horse conversion. Conceptually, you could imagine that back and forth might self-correct some color issues that the single direction would catch.
With machine learning, there can be a lot of trial-and-error to see what works and what doesn’t. For cycleGAN, it seems like the identity loss was added on when the developers noticed that color wasn’t being handled well enough with just cycle consistency. In the videos for week 3, you can see some examples of ablation studies they did with and without the various loss components (adversarial, cycle consistency, and identity). It’s a good way to get a sense of how identity loss helps.
1 Like